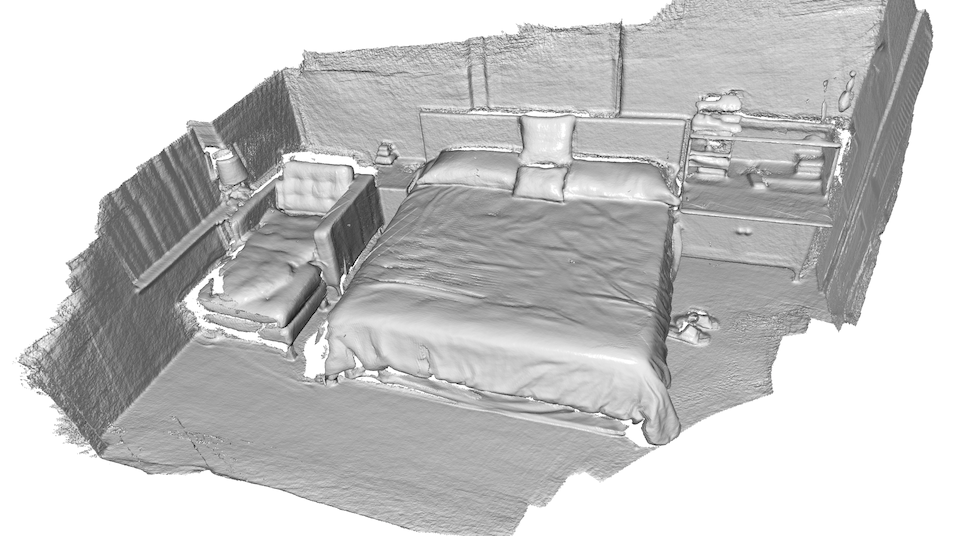
Open3D has an implementation of reconstruction pipeline introduced in our ICCV paper. A tutorial for the pipeline can be found here.
Evaluation
ManuallyAlignPointCloud included in Open3D is used for evaluation.
The RGBD camera used for the experiment was not manually calibrated - Primesense default parameters are used instead.
This occur scale error on the reconstruction, so we use ManuallyAlignPointCloud as a tool for point-to-point ICP with scale variation.
For the pair comparison, we apply the same steps for all the baseline methods.
Click this to download transformation matrices and manually picked correspondences used for evaluating our results. (requested by Thomas Schöps)
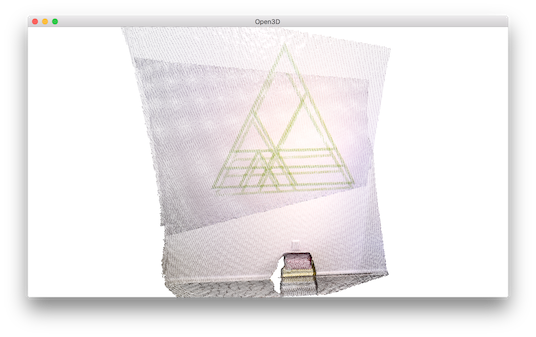 Initial alignment
Initial alignment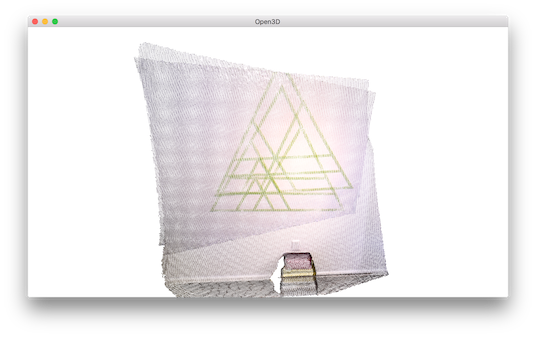 Point-to-plane ICP
Point-to-plane ICP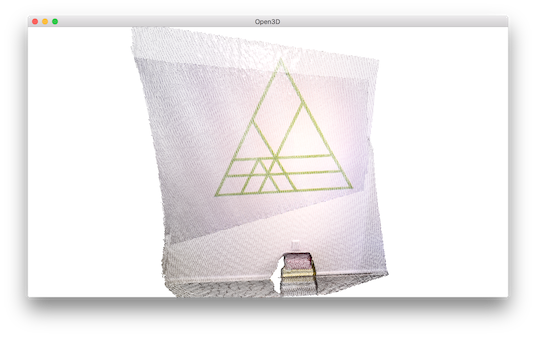 Colored point cloud registration
Colored point cloud registration